I punti di riferimento possono dare agli esploratori l’orientamento quando i loro dispositivi perdono il segnale GPS. Un ingegnere della NASA sta addestrando una A.I. ad utilizzare le caratteristiche dell’orizzonte lunare per navigare sulla Luna.
GPS per le future esplorazioni
“Per la sicurezza e il geotagging scientifico, è importante che gli esploratori sappiano esattamente dove si trovano mentre esplorano il paesaggio lunare”, ha affermato Alvin Yew, ingegnere ricercatore presso il Goddard Space Flight Center della NASA. “Dotare un dispositivo di bordo con una mappa locale, supporterebbe qualsiasi missione, sia robotica che umana”.
La NASA sta lavorando con le altre agenzie internazionali per sviluppare un’architettura di comunicazione e navigazione per la Luna. LunaNet porterà sulla Luna delle funzionalità molto simili a Internet, inclusi i servizi di localizzazione. Tuttavia, gli esploratori in alcune regioni della superficie lunare, potrebbero richiedere soluzioni derivate da più fonti. Nel caso in cui i segnali di comunicazione non fossero disponibili garantirebbe maggiore sicurezza.
“È fondamentale disporre di sistemi di backup affidabili quando si parla di esplorazione umana su altri copri celesti”, ha affermato Yew. “La motivazione è consentire l’esplorazione dei crateri lunari, dove l’intero orizzonte sarebbe stato il bordo del cratere.”
I dati LOLA
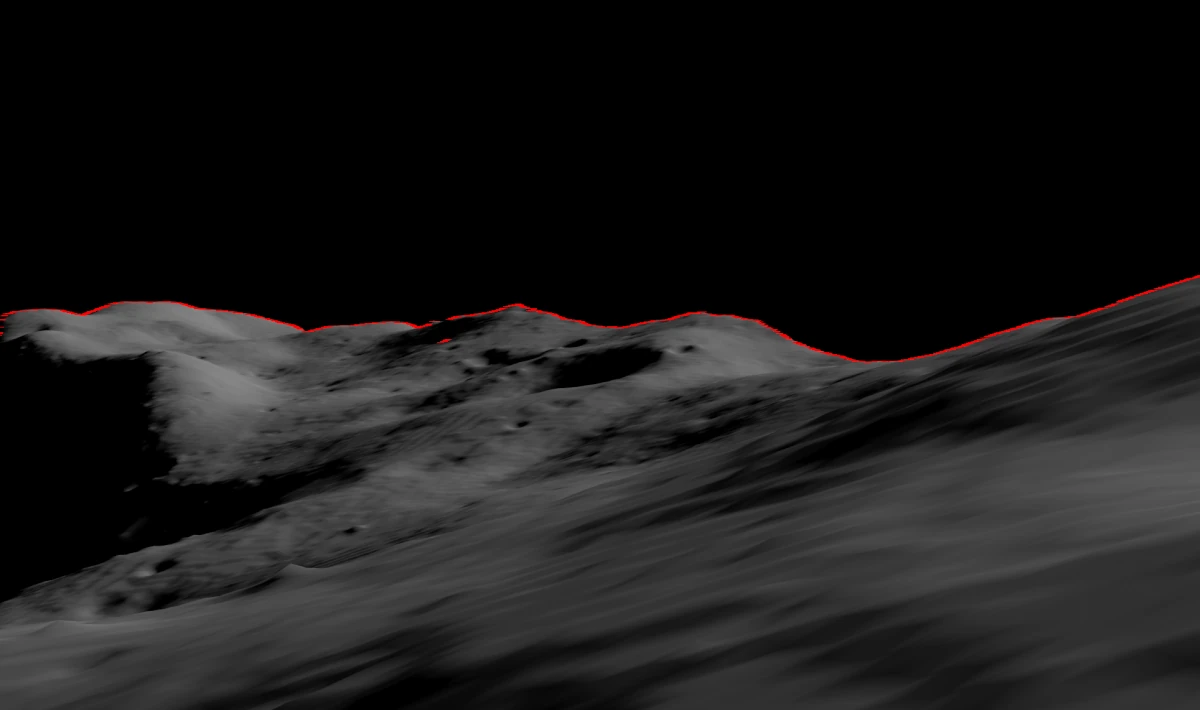
Yew ha iniziato ad utilizzare i dati del Lunar Reconnaissance Orbiter della NASA, in particolare il Lunar Orbiter Laser Altimeter (LOLA). Lo strumento misura le pendenze, la rugosità della superficie lunare e genera mappe topografiche ad alta risoluzione. Yew sta addestrando un’A.I. per ricreare le caratteristiche dell’orizzonte lunare così come apparirebbero a un esploratore, utilizzando i modelli digitali di LOLA. Questi panorami digitali possono essere utilizzati per conforntare massi e creste con quelli visibili nelle immagini scattate da un rover o da un astronauta. In tal modo si risale ad un’accurata identificazione della posizione.
“Concettualmente, è come uscire e cercare di capire dove ti trovi osservando l’orizzonte e i punti di riferimento circostanti”, ha detto Yew. “Mentre una stima della posizione potrebbe essere facile per una persona, vogliamo dimostrare la precisione sul terreno fino 9 metri. Questa accuratezza apre le porte a un’ampia gamma di concetti di missione per future esplorazioni”.
Secondo il lavoro pubblicato dal ricercatore Erwan Mazarico, un esploratore lunare può vedere al massimo fino a 300 chilometri da qualsiasi posizione libera sulla Luna. Anche sulla Terra, la tecnologia di localizzazione di Yew potrebbe aiutare gli esploratori su terreni in cui i segnali GPS sono ostruiti o soggetti a interferenze.
La navigazione ottica GIANT
Il sistema di geolocalizzazione di Yew sfrutterà le capacità di GIANT (Goddard Image Analysis and Navigation Tool). Questo strumento di navigazione ottica, sviluppato principalmente dall’ingegnere Andrew Liounis, è stato già usato per i dati di navigazione per la missione OSIRIS-REx della NASA per raccogliere un campione dall’asteroide Bennu.
A differenza degli strumenti radar o laser, GIANT analizza rapidamente e accuratamente le immagini per misurare la distanza tra i punti di riferimento visibili. La versione portatile cGIANT, è una libreria derivata dal sistema autonomo di guida e controllo della navigazione (AutoGNC). Quest’ultima fornisce soluzioni di autonomia di missione per tutte le fasi delle operazioni di veicoli spaziali e rover. La combinazione tra l’interpretazione A.I. della NASA dei panorami visivi con un modello noto del terreno, potrebbe fornire ai futuri esploratori, un potente strumento per navigare sulla Luna o altri pianeti.
- La stella XTE J1810-197 torna misteriosamente in vita ! - 23 Aprile 2024
- Come nascono le stelle supergiganti blu ? - 6 Aprile 2024
- Una nuova immagine di Sagittarius A* mostra nuovi dettagli - 31 Marzo 2024